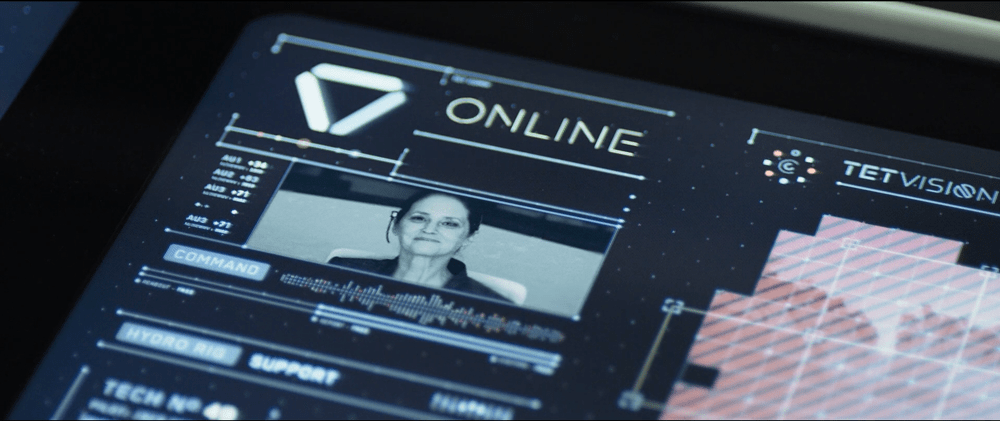
While Vika and Jack are conducting their missions on the ground, Sally is their main point of contact in orbital TET command. Vika and Sally communicate through a video feed located in the top left corner of the TETVision screen. There is no camera visible in the film, but it is made obvious that Sally can see Vika and at one point Jack as well.

The controls for the communications feed are located in the bottom left corner of the TETVision screen. There are only two controls, one for command and one for Jack. The interaction is pretty standard—tap to enable, tap again to disable. It can be assumed that conferencing is possible, although certain scenes in the film indicate that this has never taken place.

Upon first connecting with Sally each morning, Vika uploads data to the TET by using a two-finger gesture to drag the information up to Sally’s video display. There is no footage showing where she taps to begin the gesture, but it seems to originate at the hydro-rig symbol since Vika is discussing hydro-rig support as she interacts with the screen.
Same interaction for different functions
When Vika sends the hydro-rig coordinates to Jack in the Bubbleship, she is using the exact same interaction as she uses here to send the hydro-rig status data to the TET. When she uses the two-finger gesture to drag from the hydro-rig symbol to the Bubbleship, GPS coordinates are being sent. When she uses the same gesture to drag from the hydro-rig symbol to Sally’s video feed, it sends data on the hydro-rig status. How does the system know what data to send when?
It’s possible that this is another instance of agentive tech in which the system determines what data to send based on where the gesture ends. However, as mentioned in another post, it would be better to use consistent interactions for similar tasks by using the two-finger gesture to upload data to the TET and to use the one-finger gesture for sending coordinates directly with the map interface.
Or better yet, auto-upload the data to the TET upon connection and make it fully agentive. Not great for our heroes’ sense of control, but from the TET’s perspective…
TET communications status
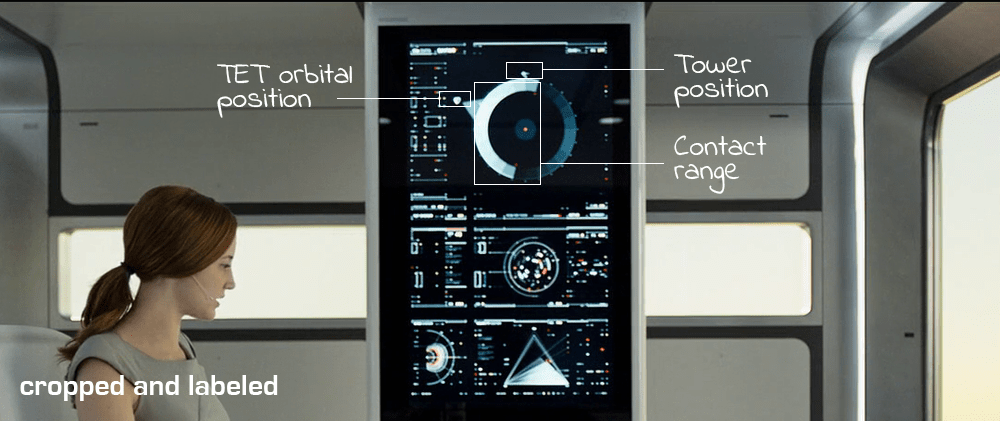
Since Vika relies heavily on the TET’s surveillance and communications capabilities, it is important for her to know when the TET is going to be within contact range. The TET system status feed, which is the screen at the top of the upright section of the desk, monitors the TET’s orbital position in relation to the tower.
As labeled in the image above, the tower position is indicated by an icon located at the top of the circle (the earth) and remains stationary as the TET icon rotates, representing the real-time orbital position. The lighter blue gradient area of the monitor indicates the TET’s range of communications. The darker area indicates when the TET is outside of contact range.
No thinking required
This is one of the simplest interfaces in the film. The visualization of data is very easy to understand and allows for a quick glimpse of all of the information Vika needs without having to think about it. The gradients represent the strength of the signal – the more solid light blue seen directly under the TET symbol indicates a full-strength signal while the darker gradients represent a weaker signal.
One of the main tenets of user experience design is to create technology that would allow anyone, regardless of their technical background, to quickly and easily use the interface with as little mental processing power as possible. Make the design obvious and self-explanatory with no training required.
Don’t make the user have to think about it.
Discover more from Sci-fi interfaces
Subscribe to get the latest posts sent to your email.
Reblogged this on LEGEND FILM LABS llc.
Pingback: Communications with Sally | Sci-Fi Interfaces | Pintsized Robot Ninja
Pingback: Oblivion’s Communications with Sally »
Pingback: TETVision | Sci-fi interfaces
Pingback: Oblivion’s TETVision »